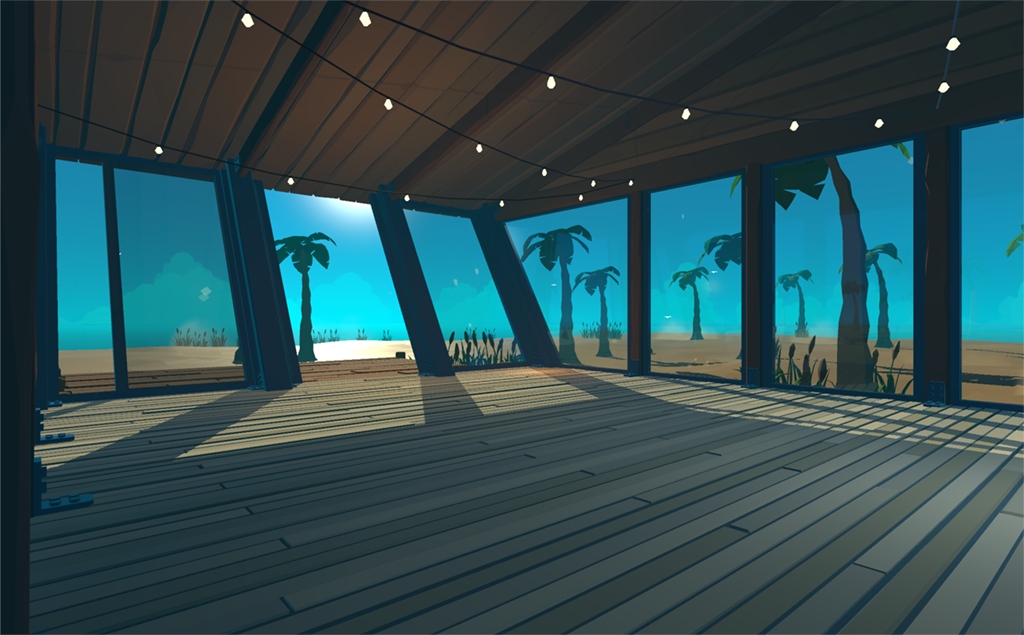
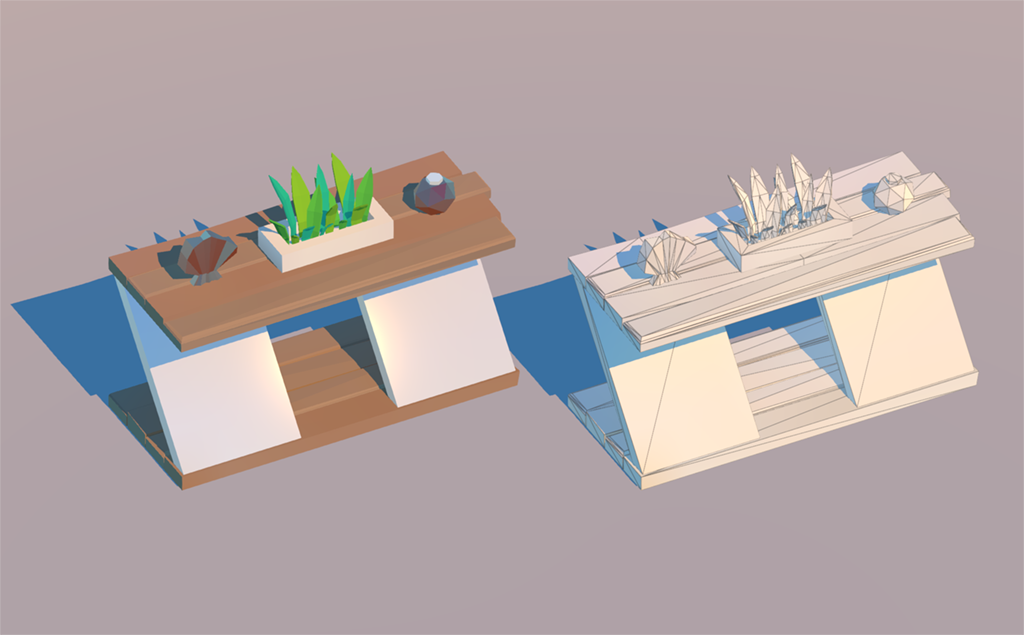
Beach House
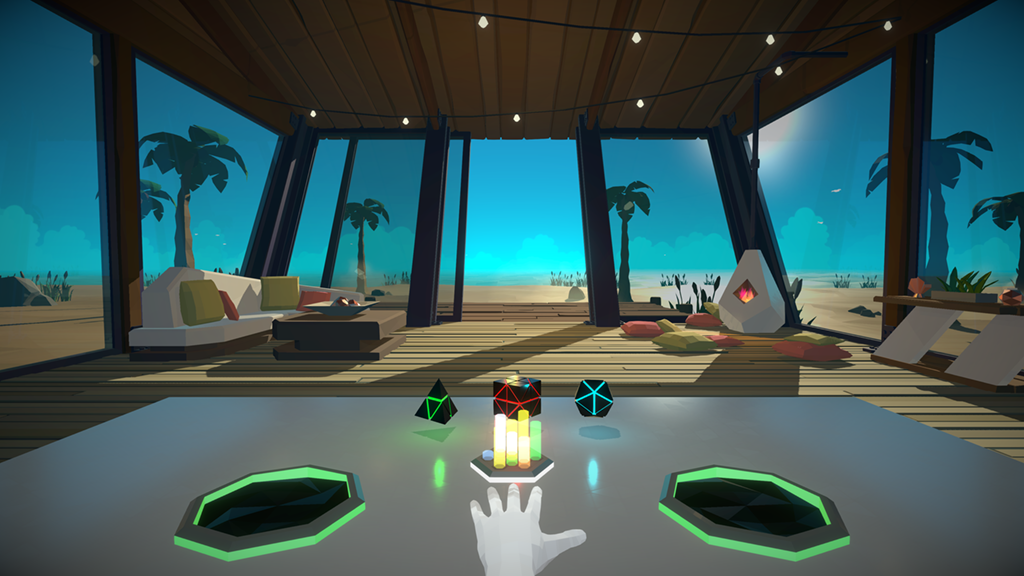
The proposed work aims to produce and validate an interactive virtual environment coupled with a wearable robotic system which will provide stroke patients with assisted motion for sensorimotor rehabilitation of the hand while tracking performance within a 3D environment. Stroke remains a leading cause of partial or full loss of sensory and motor function with the majority, 65%, of stroke survivors failing to incorporate the paretic hand into their daily activities after six months. Rehabilitation research has shown that stroke patients are particularly responsive to interactive, functional, and repetitive practice of movement which utilizes the brains inherent neuroplasticity to adapt to injury. The variety of activities which can be provided within a virtual environment will ensure better patient engagement and enthusiasm for their rehabilitation leading to greater compliance and enhanced functional recovery.
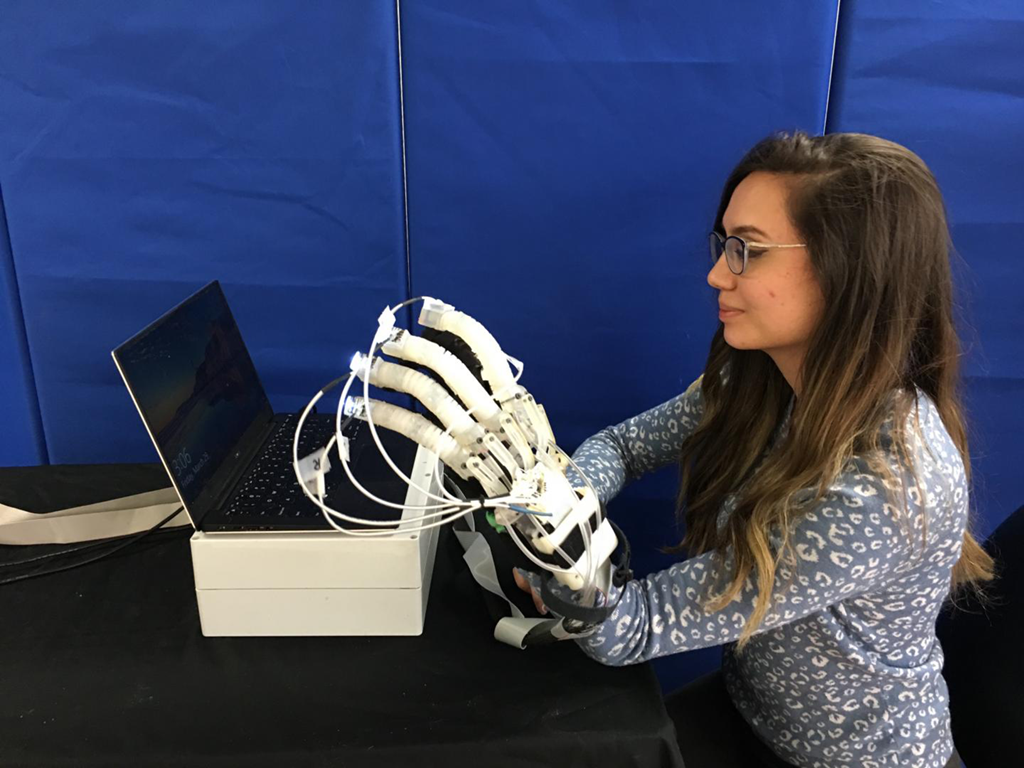
This project is still a work in progress and we are still seeking funding opportunites. This demo is fully functional and can work with both the motion assisted wearable glove and leap motion sensor. The rehabilitation simulation is a collaboration between the University of Texas Arlington Research Institue (UTARI), who are developing the glove, and the University of Texas Arlington Art + Art History Department, who are creating the simulation.
Simulation Team
- Joshua Wilson
- Alex Lindsay
Glove Team
- Muthu Wijesundara
- Mahdi Haghshenas-Jaryani
- Pavan Nuthi
- Alex Lindsay
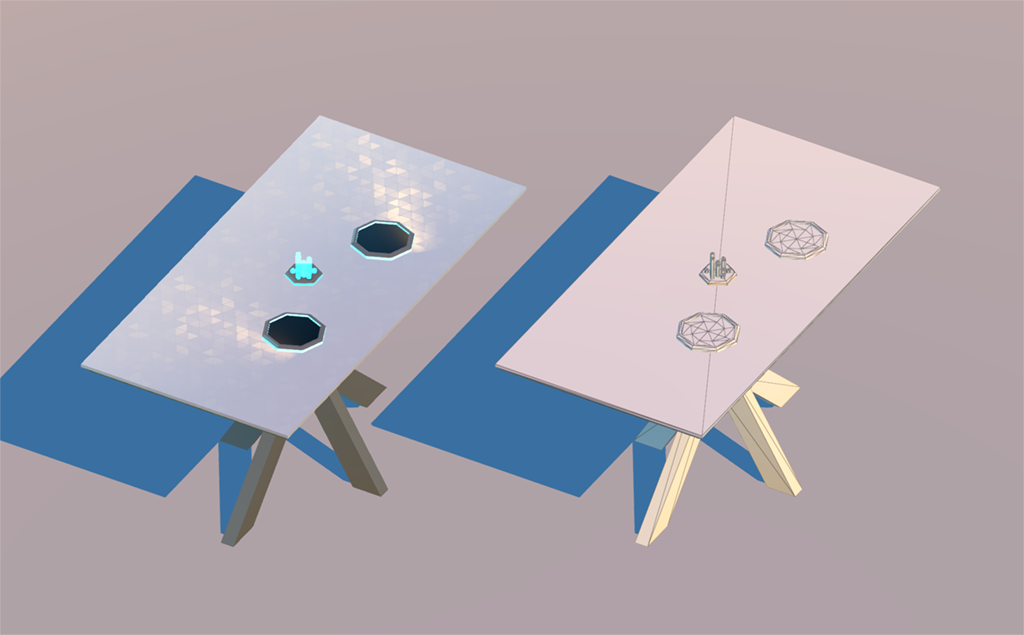
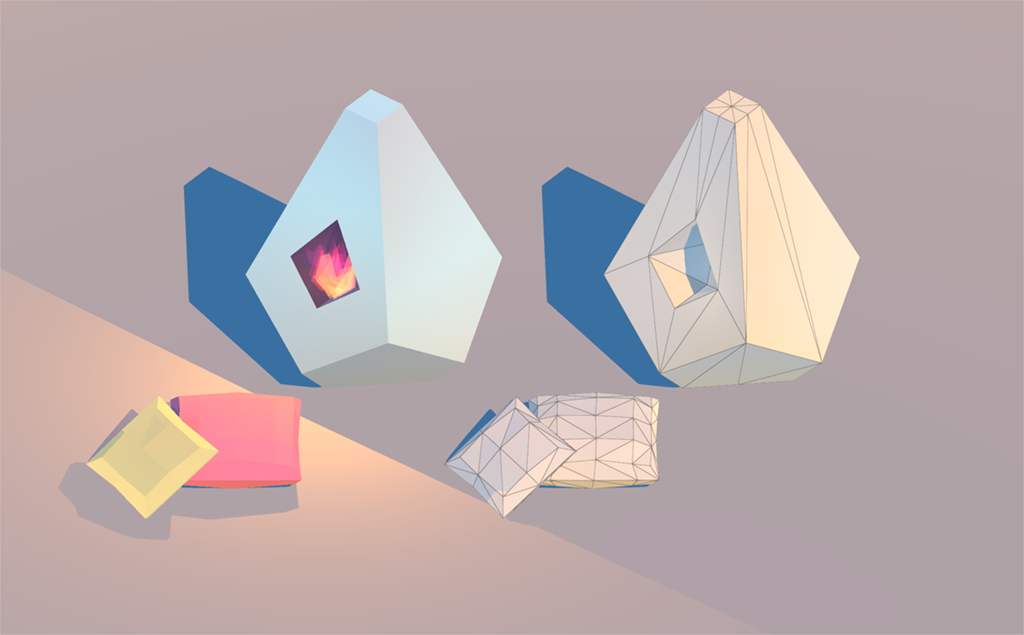
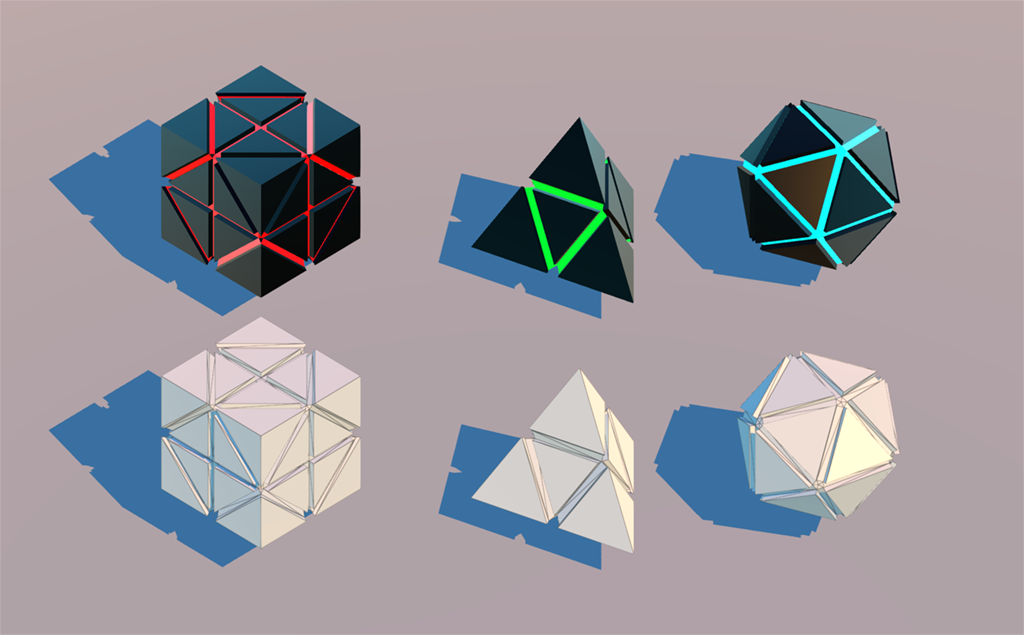
Process